設計者およびエンジニア向けのガイドライン(III) 9章から


Piezomechanik
9 電動アクチュエータの駆動原理 Electrical actuator driving philosophy 9
作動のために、電気エネルギーが機械的反応に変換されます。
アクチュエータのエネルギー量 E は、アクティブな圧電セラミックの体積と印加された電界強度のみに依存します。
通常の電気用語で表すと、エネルギー量 E は
E = 1⁄2 CU2
ピエゾ作動の初心者は、非常に一般的な方法でエネルギーまたは電力を節約するために、静電容量が非常に小さいアクチュエータを求めています。 エネルギー保存は圧電力学にも有効であることを覚えておいてください。 低い電気入力では、高出力の機械出力を達成することはできません。
電気的パラメータ「静電容量」は応答です。
電気側のエネルギー結合に使用します。 したがって、任意の方法で最小化することはできません。
さらに、容量自体は消費電力の絶対的な尺度ではありません。 上記のように、印加電圧レベルにさらに依存します。 したがって、高電圧と低電圧では、エネルギーと電力のバランスが同じでも公称静電容量値が大きく異なることは自明です。
9.1 電気的活性化パラメータと圧電機械反応
9.1 Electrical activation parameters and piezo-mechanical reaction
電力供給は、ピエゾ作動システムの性能を大きく左右します。
したがって、適切に適合された電子機器を慎重に選択することが必須です。
電気ノイズ
ピエゾ作動のユニークな機能の 1 つは、小さな正確な電気信号を同等の小さな位置シフトに変換することです。 その結果、ノイズやその他の不安定性などの望ましくない電気信号の変動は、同等の「機械的」ノイズまたは位置の不確実性に変換されます。
圧電機械システムの位置決め精度は、圧電アクチュエータ自体ではなく、電子機器の品質によって制限されることがわかっています。 したがって、超精密位置決めには、信号/ノイズ (S/N) 比に関して高品質の電源が必要です。
位置ノイズ lnoise は、次のように推定できます。
Δlnoise = ΔUnoise x (Δlmax/Umax)
Δlmax: 最大電圧でのアクチュエータの最大ストローク ΔUmax
ΔUnoise: 電圧ノイズ
最小のノイズ レベルは、低電力のアナログ リニア アンプによって達成されます。
ハイパワースイッチングアンプはノイズレベルが高く、主にダイナミックモーションコントロールに使用されます。
PIEZOMECHANIK は、高感度の位置決めタスク向けに低ノイズ アンプ SVR を提供しています。
■例
低ノイズ増幅器 SVR 150 は、約 0.3 mVpp のノイズ レベルを示します。
ピエゾ スタック PSt 150/7/20 VS 12 (ストローク 20 μm@ 0 V/150 V) と組み合わせると、位置の同等の公称不確実性は 0.04 ナノメートルになります。
ノイズによる電圧変調は「小信号励起」を表すため、位置の実際の変動は << 1 オングストロームです。
パルス動作
ピエゾスタックの機械的応答/立ち上がり時間は、アクチュエータの静電容量の充電時間によって決まります。 充電電流が高いほど、アクチュエータの反応が速くなります。
電圧変動 dU(t) に相当する位置のシフトを立ち上がり時間 dt で取得するには、次の式に従って実際の電流 Ia(t) が必要です。
Ia(t) = C dU(t)/dt C アクチュエータの静電容量
Ia(t) の最大定格は、電源が供給するのに必要なピーク電流 Ipeak です。
最も一般的な信号プロファイルのピーク電流 Ipeak を以下に示します。
Sine: Ipeak = πC Upp f
Triangle: Ipeak = C Upp f
Square wave: Ipeak = C Upp/dt
Upp 総電圧スイングスパンニングハブ U = Upp. dt 電圧上昇時間
立ち上がり時間が非常に短い場合、必要なピーク電流が大幅に高いレベルに達する可能性があります。
■例
5μファラッドの静電容量を持つピエゾ アクチュエータは、電圧ステップ U
pp 0 V/150 V で時間 dt 以内に充電されます。
dtc = 100 msec = > Ipeak = 7.5 mA
低ダイナミックポジショニング。 アンプSVR 150によって
dtc = 1 msec => Ipeak = 750 mA
ダイナミック モーション コントロール、LE150/100EBW アンプのパワー レベル
dtc= 150 μsec => Ipeak = 5 A
ピエゾ燃料インジェクター、HVP などの電源スイッチを使用
dtc = 10 μsec => Ipeak = 75 A
HVP スイッチを使用したピエゾ ショックの生成
立ち上がり時間が 1 ミリ秒未満の場合、ピエゾ アクチュエータは非常に高い電気的および機械的負荷条件に適合させる必要があります。 標準のアクチュエーターは故障します (チャプター 4.9: mech. preloads を参照)。
パルス発生器
高速の 2 レベル励起を使用する特殊なアプリケーションでは、安定して信号が変化するアンプは必要ありません。
単純な「開」と「閉」レベルのバルブの単純なパルス幅変調の場合、単純な電気スイッチがその役割を果たします。 「大きなブロック」アクチュエータは大きな静電容量を示すため、高い充電電流 (最大 100 アンペアのオーダー) が必要になることに注意してください。
このような目的では、効率とコストの理由から、高電力の「オン/オフ」スイッチが使用されます。
衝撃発生用のHVPスイッチおよびその誘導体についてはピエゾメカニックにお問い合わせください。
前述のように、パルス動作では、スタック構造の機械的損傷を防ぐために、アクチュエータ構成を慎重に調整する必要があります。 標準のアクチュエーターは故障します!
長期平均電流
異なる周波数 f と電圧変動 ΔU を持つピエゾアクチュエータの長期サイクリング動作では、それに応じてアクチュエータの静電容量 C が充電/放電されます。
これにより、以下に従って平均充電電流 i が定義されます。
i = C ΔU f
明確な信号機能の永続的なサイクルを生成するために、パワー エレクトロニクスは、両方の電流定格 (短期ピーク電流と長期平均電流) に対して選択する必要があります。
周期信号の場合、ピーク電流と平均電流の比率は固定されます。
例:
高調波循環 Ipeak : I ratioπ : 1
三角形 Ipeak / I= 1
PIEZOMECHANIK のパワーアンプは、ほとんどの場合、Ipeak : I = 3 の比率で設計されており、cw の高いダイナミック サイクリングを可能にします。 モーションコントロールアプリケーション向け。
エネルギー/パワーバランス
ピエゾアクチュエータのエネルギー量 E は
E = 1⁄2 CU2、電圧 U まで充電した場合。
アクチュエーターの充電時に入力される電気エネルギーは、次のように分けられます。
● 機械的作業 (変位、弾性変形) (=> 4.2 章)。
● 損失損失 = 自己発熱率 約 5 ~ 20% は、詳細な機械的駆動条件に依存します。
● 変換されていない電気的静止エネルギー: 放電するまでアクチュエータに保存されます。
平均消費電力
エネルギー量 E のアクチュエータが周波数 f で循環する場合、平均充電電力 P は次のように必要です。
P=E f
■例:
10 μファラッドのアクチュエーターが 0 V/100 V で 100 Hz で充電 => 平均充電電力: 5 ワット。
お知らせ:
充電電力のかなりの部分が無効です。 放電中にアンプにリダイレクトされます。 標準のリニアアンプは、この電力を内部で熱に変換するため、1 サイクルあたりの総エネルギーが最終的に消費されます。
より電力効率の高い代替手段は、エネルギー リサイクル (エネルギー回生) を備えたアンプです。
入力電気エネルギーの無効部分は、アンプにフィードバックされると、次の充電サイクルに再利用できます。 スイッチャータイプのアンプは、PIEZOMECHANIK の RCV アンプのようにエネルギー回収用に設計できます。
この種の戦略のみが、非共振アクチュエータが許容できる努力で高出力レベルでサイクルすることを可能にします。
9.1 電気的活性化パラメータと圧電機械反応
Electrical activation parameters and piezo-mechanical reaction
電圧範囲、電圧極性
従来のアクチュエータの起動は、アクチュエータの指定された電圧極性と動作範囲に従って、ユニポーラ電圧信号 0/Umax を使用して行われました。 この種の操作は、指定されたすべての操作側条件の下で適用できます。 温度範囲。 一方、明確な条件下では、セミバイポーラまたはバイポーラ信号をピエゾスタックに入れ、その変位と力の範囲を拡大できることが経験されています。
注目すべき点は、いわゆる「抗電界強度」で表されるPZTセラミックの脱分極安定性です。 この脱分極しきい値は、セラミックの温度に大きく依存します。 ピエゾアクチュエータは、このレベルが対応する電界を抗電界 Edepol より十分に低く保つ限り、逆極性電圧で動作させることができます (図 9.1)。
お知らせ:
上記の側面は、バイモルフ ベンダーやせん断要素などのあらゆる種類の圧電セラミック コンポーネントに有効です。
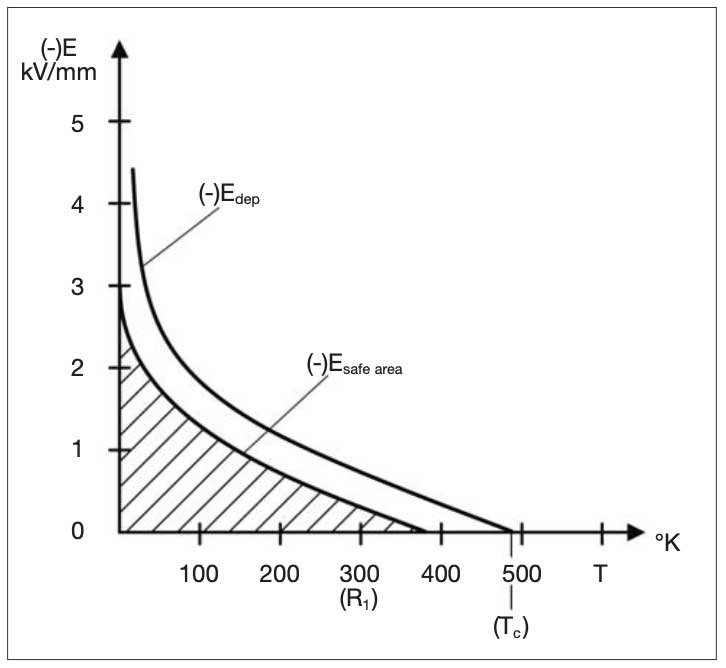
図 9.1: PZT セラミックスのデポーリングまたは抗電界の温度依存性の概略図。 ピエゾ アクチュエータの逆電界動作は、Edepol と比較して低い電界レベルで安全な領域に留まる必要があります。
一般に、動作温度に応じて 3 つの動作モードを区別できます。
ユニポーラ活性化: 動作温度範囲全体に適用できます。
セミバイポーラ動作:室温以下。
バイポーラ動作: 最大電圧定格は非常に低い温度でのみ適用されます。
電圧スイングが広いほど、変位と力の発生が大きくなります。 個々の駆動条件は、使用する PZT 材料の種類にも依存します。
ユニポーラアンプ
PIEZOMECHANIK は、ユニポーラ デバイスで使用するパワー アンプ LE および RCV を提供しています。
高温では PZT セラミックのデポールは発生しません (自己発熱の可能性があります!)。
セミバイポーラアンプ
低い Tc を持つ PZT セラミックは、最大定格の約 20% の逆電圧を受け入れることができます。
((-)0.2 Umax)
この拡張された電圧範囲により、ストロークや力の生成などのアクチュエータのピエゾ機械性能が少なくとも 20% 向上します。 PIEZOMECHANK は、セミバイポーラ デバイスで使用する低電力アンプ SVR を提供しています。低電力レベルのため、圧電セラミック内で自己発熱が発生しません。
バイポーラアンプ
室温でのバイポーラ セラミックの活性化は、ほとんどの場合、せん断要素またはバイモルフ ベンダーを使用して行われ、対称的な両面動作が得られます。 減極効果があるため、定格電圧を超えないようにしてください。
電界誘起デポーリングに対する PZT セラミックスの安定性は、極低温で著しく向上します。 したがって、ピエゾ スタックは、非常に低い温度 (77°K 未満) で最大定格電圧のバイポーラ動作を受け入れます。
PIEZOMECHANIK は、低消費電力のバイポーラ アンプ SVRbip を標準で提供しています。
9.2 代替操作コンセプト: 電流制御. Alternative operating concepts: current control
アクチュエータ応答のコンデンサ記述を分析すると、次の単純な関係が得られます。 アクチュエータ位置 l(t) は、電圧または電荷量に関連しています。
l(t) ~ Q(t) = C U(t)
Q(t) アクチュエータの電荷量 アクチュエータ容量の式 C(E) は、印加電界 E による C の変化を示し、PZT セラミックの非線形強誘電挙動を反映します。
アクチュエータ速度 v = dl/dt ~ dQ/dt = Im
アクチュエータ加速度 b ~ dIm/dt = Im
ピエゾ アクチュエータの充電および電流制御動作に関する上記の関係は、サブレゾナント アクティベーションに対してのみ有効です。
PZT セラミックの非線形動作により、電圧または電荷/電流制御によるピエゾアクチュエータの制御は、異なる応答をもたらします。
動剛性の向上
ピエゾ スタックの電荷バランスは、電源によって変化するだけでなく、負荷の変動によっても変化します (=> 4.6 章)。
電圧制御は、これらの種類の充電に違いはありません。 開ループ充電/電流制御は、充電バランスを定量的に処理し、アクチュエータの応答をさまざまな負荷力に対してより鈍感にする => より高い剛性を実現します。
位置ではなく速度の制御
電流制御アンプは、入力信号を介して、主にアクチュエータの位置ではなく速度を変調します。
位置と電荷量 Q の間の線形関係
位置電荷特性は、ヒステリシスが (ほぼ) なく、良好な直線性を示しています。 9.2. 充電による段階的な起動後、位置のドリフトは発生しません。
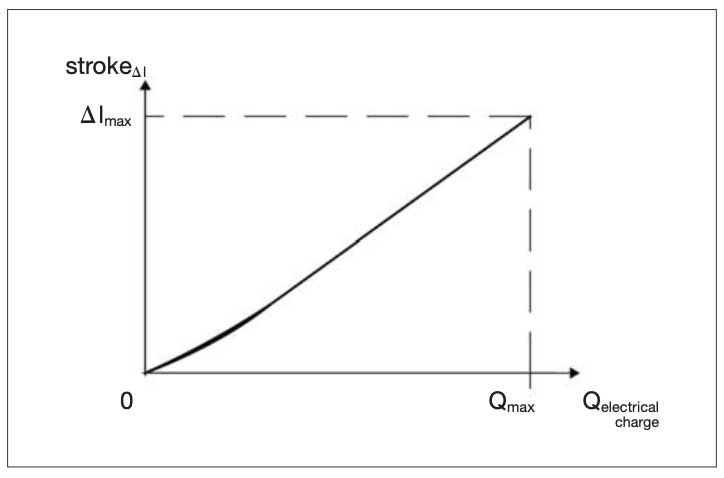
図 9.2: 電荷制御による位置の線形応答 (最大駆動電圧でのアクチュエータの最大電荷量)
実践のための結論
● 開ループ電流制御は、動的モーション制御または音響振動の生成に優先的に使用されます。 この理由は、開ループの線形応答により、低高調波歪みとも呼ばれる側波帯が回避されるためです。
● モーション制御は、多くの場合、動的パラメータの速度と加速度を制御することを目的としています。 電流制御により、これらのパラメータに直接アクセスできます。
● 動的剛性が高いと、圧電機械セットアップの応答速度が向上します。
● 上記パラメータの開ループ制御は、閉ループ電圧制御ベースのシステムよりも高速です。
充電/電流制御と精密位置決め?
開ループ充電または電流制御は、非常に高精度の位置決めには適していません。
理由は次のとおりです。
●直線性、ヒステリシスは最大ストロークの約1%
●電荷/位置特性は温度によって変化します
● ダイナミック ポジショニングが低いと、電流が非常に小さくなり、制御が困難になります。 静的条件下では、漏れ電流によるスタックの自己放電は、位置に関連する影響と区別できません。
● 開ループ制御手段では、外部のずれの影響を補償することはできません。
高精度の位置決めには、位置検出による閉ループフィードバック制御が必要です。 これにより、よりシンプルで低コストの電圧制御電子機器を使用できるようになります。
データシートに関するコメント
データシートに記載されているアクチュエータの静電容量の定義に関する実験的根拠を注意深く確認してください。 通常、いわゆる低電界値は、PZT の非線形効果が存在しない非常に低い電圧励起レベルで測定されたデータシートに記載されています (静電容量計は、1 kHz で 1 ~ 2 ボルトの励起を使用します)。
アクチュエータの電圧限界での PZT セラミックスの高電界励起は、低電界励起と比較して 50% またはそれ以上の実効静電容量を示します。 さらに、静電容量は温度上昇とともにさらに増加します。
実際のアクチュエータの静電容量は、データシートの値の 2 倍程度の大きさになる場合があります。
9.3 一般的なピエゾアンプの基本機能 Basic features of a common piezo-amplifier

図 9.3: LE製品ラインのピエゾパワーアンプのフロントパネル
1 オフセット
ピエゾへの DC 電圧レベルを手動で設定するためのポテンショメータ。 このアンプは、ピエゾ電圧を手動で設定する自律型電源として使用できます。
さらに、DC 電圧レベルは、入力 (3) からの増幅された外部信号に重畳されます。
2 アンプル
外部信号 (入力 (3)) を増幅するアンプのゲイン係数を連続的に変化させるためのポテンショメータ
3. 入力
外部ソース(関数発生器など)からアナログ信号を入力する
4 モニター
ピエゾ電圧出力 (6) と並列の低電力信号出力。
ピエゾ電圧のダイナミクスをオンラインでリアルタイムに監視する場合。 オシロスコープ経由。
削減係数 1:100 または 1:1000
5 LC ディスプレイ
遅い応答: ほぼ静的な読み出しに使用されます。 手動ピエゾ電圧とともに
「オフセット」による設定
6 出力
プラグ: 圧電アクチュエータの供給電圧
注意:
高電圧、大電流 
10 圧電機械システムのセットアップ
Setting up a piezo- mechanical system 10
ガイドライン
適切なピエゾ コンポーネントを選択するための主な前提条件は、必要な動作プロファイルをユーザーが正確に定義することです。
圧電機械部品のサプライヤは、要求された部品の正確な仕様を高く評価します。
必要なピエゾ パラメータに具体的な数値を設定すると、大きすぎたりミスマッチしたりするのを避けるのに役立ちます。 選択が不十分なシステム コンポーネントは効果がなく、したがって高価です (=> 4章)。
以下に従って、メカニックを正常に操作するためのニーズを分析してみてください。
A、どのシフト/ストロークを達成する必要がありますか?
B、圧電作用によってどのような力の変化が発生しますか?
C、最初からアクチュエータに作用している静的予圧はどれくらいですか?
D、希望する最大動作周波数は?
E、最大頻度 ( D) での望ましいストロークは?
F、希望の最大値は何ですか。 最大ストロークでの周波数 (A を参照) ? G、達成可能な最短の立ち上がり時間 - / 立ち下がり時間?
H、アクチュエータにはどのような外部質量を取り付ける必要がありますか?
A から C までは、第 4 章に従って低動的操作用のアクチュエータを選択できるようにします。
D から H までは、指定された動的操作に最適な組み合わせを目指します。
アンプの選択
上記の選択プロセスにより、異なる電圧範囲と電気容量を持つピエゾ アクチュエータが得られます。 電圧範囲が一致するアンプのみを使用することを検討してください。
より高い電圧を提供するアンプを使用しないでください。
動的動作プロファイル D から H は、9.1 章に従って、必要な電流レベル (Ipeak および Iaverage) を定義します。
アクチュエータの消費電力がワット範囲を超えると、ピエゾ セラミックスの自己発熱が発生する可能性があります (=> 6.1 章の熱管理)。
11 アプリケーションの新しい傾向 New trends of application11
ポジショニングを超えて
スタックベースのピエゾ作動の最初のアプリケーションは、1960 年代から 1970 年代の (コヒーレント) 光学で、新興のレーザー技術と半導体産業向けの超精密位置決めドライブとして使用されました。 力の生成や高ダイナミックな動作などの他のハイライトは焦点ではありませんでしたが、これは時間の経過とともに変化しました。
現在、多くの新しいアプリケーションが、ピエゾ作動によって提供される優れた機能の全範囲を使用することを目指しています。
これらの新しいアプリケーションには次のものがあります。
- ピエゾ燃料インジェクター
- 運動制御
- 振動発生:
音響、構造励起
- 油圧ポンプ
・ミニチュアマシン(MEMS、NEMS) 等
11.1 ピエゾアクチュエータとテストエンジニアリング 11.1 Piezo actuators and test engineering
ピエゾによる振動発生
信頼性研究や材料特性評価のためのコンポーネント試験には、多数のサイクルにわたる明確に定義されたストローク/力発生プロファイルが必要です。 高い再現性が求められます。
その場合、一般的な機械式ドライブは繰り返し率が制限されるため、テスト期間がかなり長くなります。 ピエゾアクチュエータは、高い再現性と高い周波数をサイクルさせる能力により、明確なテスト手順に対して顕著な利点を提供します。
興味深い点の 1 つは、高周波ピエゾドライブを追加することによる従来のテスト フレームのアップグレードです。 従来のロング ストローク性能は、高周波の微調整によって重ね合わせることができます (図 11.1)。
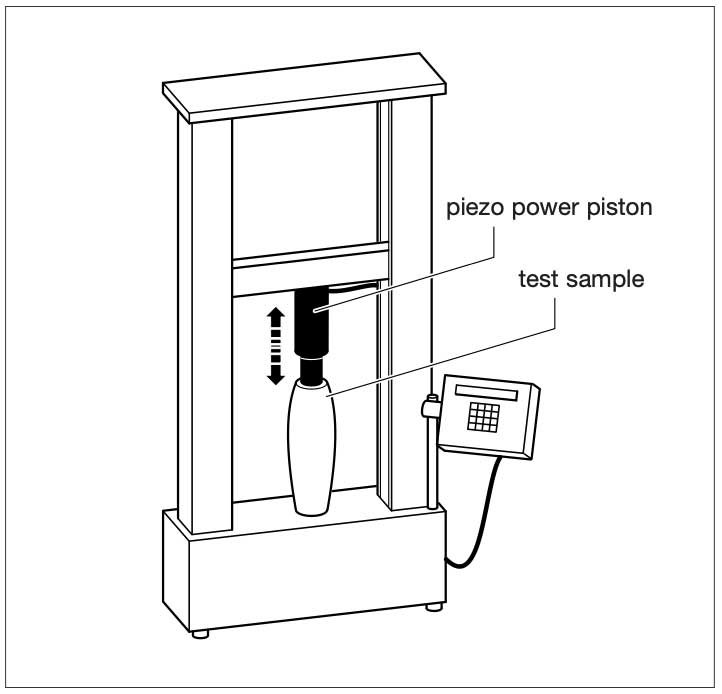
図 11.1: 拡張動作ダイナミクス用の高負荷ロング ストローク ピエゾ アクチュエータを追加したテスト エンジニアリング用の従来のセットアップの概略図。
ピエゾメカニカル アレンジメントを使用する成功例。
- フレッティング試験
・超高サイクル疲労試験
- ポリマーの材料試験
- 高周波加振、シェーカー
従来の電磁シェーカーの周波数範囲は通常、約 5 kHz に制限されています。 ピエゾベースのシェーカーは、この上限周波数を >> 10 kHz に向かって拡張します。
小規模な要素による 100 kHz の励起は、モード解析や構造伝搬音響の研究のために小型構造に振動を励起することは珍しくありません。
ピエゾによる衝撃発生
構造の高周波高調波励起に代わるものは、単一パルスを適用して機械構造の固有周波数を励起することです。 励起された振動の減衰を分析することにより、システムの機械的パラメーターを分析できます。
ピエゾ特有の特徴は、
● 非弾道衝撃の発生、衝撃の発生および伝達前の衝撃パートナー間の機械的接触
● 加速度レベルの幅広い調整範囲 (100 m/sec2 から > 100.000 m/sec2 まで)
● 機械的衝撃パラメータの電気的調整 (振幅、立ち上がり時間など)
● 単発、バースト、または連続操作が可能
シェーカーと衝撃発生器の間の一種の中間圧電励振器は、いわゆるバースト発生器になります。 潜在的なアプリケーションは、パイロテストのコンテキストでの SRS (Shock Response Spectrum) のシミュレーションです。
技術的な観点から見ると、衝撃の生成はピエゾ スタックの異常な駆動モードです。
電気的励起は、スタックを通過する音の音響通過時間と比較して非常に短い (< 10 マイクロ秒)。
圧電セラミック内で伝播する衝撃波面は、時間と場所の両方で非常に不均一な機械的応力分布につながります。 この状態は通常、圧電技術では厳密に回避されます。 信頼性の高い構成を得るには、衝撃発生器設計のための特別な機械設備が必要です。
加速度計の校正、品質管理
PIEZOMECHANIK は、2006 年以来、産業用加速度計メーカーにピエゾ ショッカー ベースのテスト装置を提供してきました。
非弾道ホプキンソンバー励起の説明を含む、適切な配置の基本的な構成が現時点で公開されています。 (=> 図 11.2.)
高いひずみ速度での材料試験は、いわゆるスプリット ホプキンソン バー配置でより高い繰り返し率で実行できます。
ピエゾショック発生装置は現在、校正サービスで実用化されています。
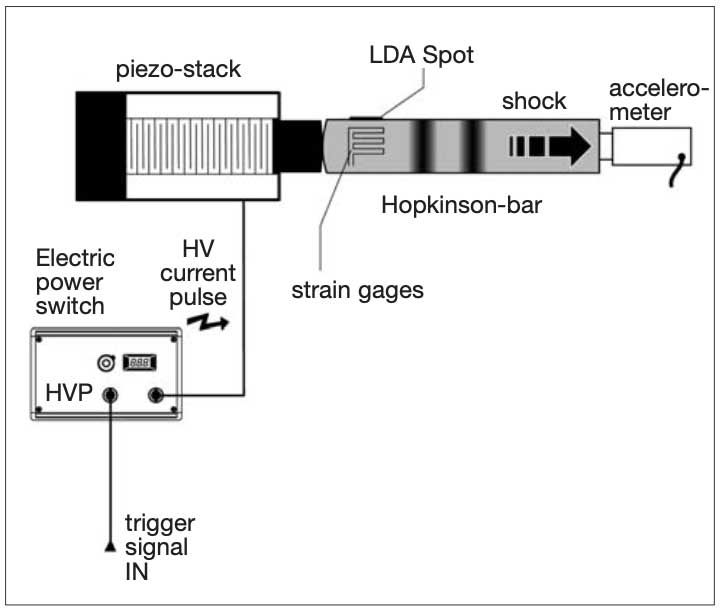 図 11.2:
図 11.2: 非弾道ピエゾショック発生によるセンサーテスト用のホプキンソンバー配置。
お知らせ:
ピエゾ ショックは、燃料噴射器で使用される一般的な「高速作動」ピエゾ素子とは区別されます。電気励起時間は、音の通過時間に比べて十分に長い (約 100μsec)。 スタックは、その固有振動数未満で機械的に励起され、ほぼ均一な応力分布を持ちます。 燃料インジェクタ内で実際にショックが作動すると、リンギング効果により噴射バランスが悪化します。
11.2 モーションコントロール Motion control
モーション制御は、通常はフィードバック制御システムで行われる、明確に定義された基準に基づくあらゆる種類のモーション生成の一般的な表現です。
この文脈における特別な分野は、以下を備えたアクティブ振動制御です。
アクティブ振動発生
アクティブ防振
アクティブ除振
アダプトロニクス、モーフィング
ピエゾ機械コンポーネントは、アダプティブ ウィング、アダプティブ ローター、アダプティブ オプティクス、アダプティブ フレーム構造などの機能プロファイルの動的アクティブ シェーピングに使用されます。
11.3 電気エネルギーの生成 Generation of electrical energy
ピエゾ素子の次のアプリケーションは、PIEZOMECHANIK のプログラムの一部ではありません。 この明白な事実を無視して、多くの問い合わせが来ています。
- 力変換器、加速度計
- エネルギーハーベスティング(エネルギースカベンジング)
- 圧電トランス
したがって、ピエゾ ファンタジーとピエゾ リアリティを区別するために、いくつかのステートメントを作成する必要があります。
本来の圧電効果は、入力された機械的な力を電荷に変換する発電機効果です。
この電気機械変換が双方向であることも事実です。
圧電力学と圧電
ピエゾアクチュエータはピエゾ発電機効果を発揮しますが、この種の用途には特に適していません。
それにもかかわらず、いくつかのヒントが与えられます。
● 変換効率は、PZT 材料データ表に示されている g 定数に関連しています。
● PZT セラミックスはある程度の「老化」を示します。これは、脱分極による変換効率の長期的な低下を意味します。 これは発電機効果にとって重要ですが、作動には関係ありません。
●力変換器など
定量的な測定には、水晶のような単結晶材料が使用されます。 高温アプリケーションでは、より効果的な GaPO4 が使用されます。 多結晶 PZT は、測定品質の妥協が許容される場合、低コストの代替手段です。 PZT の主な利点は、信号検出を容易にするはるかに高い発電機効率です。通常、力の測定は、誘導電圧ではなく、発生した電荷の量を決定することによって行われます。
● エネルギー ハーベスティング、エネルギー スカベンジング
1 立方センチメートル (cm3) の PZT 材料は、機械的負荷が高い場合でも、1 サイクルあたり数ミリワット秒 (10-3 Ws) のエネルギーを供給します。 この事実から、いくつかのピエゾ素子を田舎に接着し、時々圧搾しても、その世界のエネルギー問題は解決しないことが容易にわかります。
ピエゾによる発電は、主にサイクル周波数に依存します。 ワットのオーダーを達成するには、少なくともキロヘルツ範囲のサイクル周波数が必要です。
ピエゾベースの発電機を扱う本格的なプロジェクトでは、「マイクロエネルギーハーベスティング」について話しています。 情報伝達用、環境パラメーター用のセンサーユニット、玩具用。
●ピエゾトランス
双方向ピエゾ効果の完璧な例はピエゾトランスです。
入力と出力の間のエネルギー結合は、機械的結合によって行われます。 誘導要素からの磁場。
図 11.3 は、ピエゾ スタックの d33 効果に基づくデモ配置を示しています。
2 つのスタックが固定フレームに取り付けられています。
スタック 1 は、低電圧作動用に層厚「d」が小さい一般的な多層設計を示しています。 2番目の「スタック」は、1つの厚いレイヤー「D」のみで構成されています。
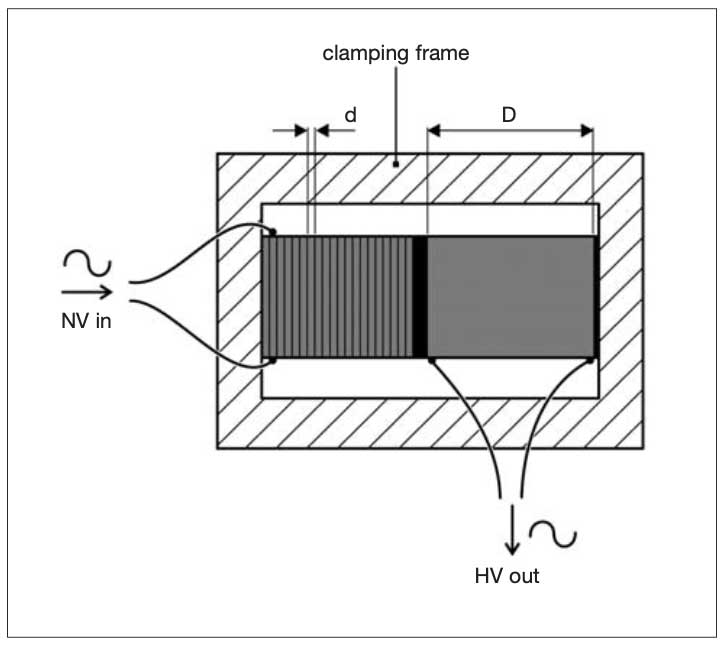
図 11.3: アキシャル d33 変圧器配置の概略図
低電圧信号入力によるスタック 1 の拡張は、スタック 2 を圧迫し、明確な電荷を生成します。 大きな「D」はそれを高電圧出力に変換します。 このスキームは、サイクルごとに非共鳴的に機能します。 サイクル周波数によって平均発電量が決まります。
注意: トランス比 Uin/Uout は、d/D 比が示唆するよりも複雑です!
実際のピエゾトランス:
実際には、共振システムが使用されます。 この慣性ベースの操作により、機械的なフレームワークへの取り付けが回避されます。 効率的な共振動作には、高品質係数 (=> 8.) を備えた硬質超音波 PZT セラミックが必要です。
典型的な圧電トランスは、>>20 kHz からメガヘルツまでの範囲の共振を使用します。 電力伝達は通常、ワット範囲です。 これは、ピエゾによる発電が主に周波数の問題であることを再度示しています。
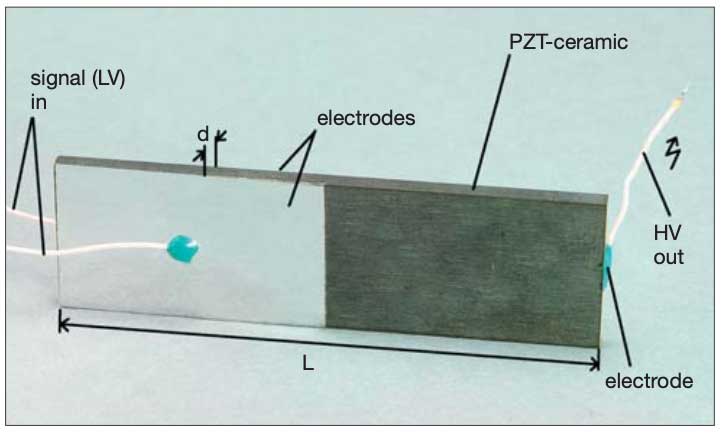
図 11.4: 電圧 > 10 kV 用のモノリシック高電圧ピエゾ トランス (ローゼン型)
メカニカル d33-d31 カップリング。 d経由で低電圧信号入力、共振Lにより高電圧発生
共振トランスは、最適な動作のために注意が必要です。
入力信号の周波数は、トランスの共振に正確に一致する必要があります。 トランスからの電力抽出は一種の減衰であり、共振周波数の離調につながります。 安定した電力効率を得るには、何らかの補償回路が必要です。
圧電トランスの主な利点は、スリムなデザインと磁場がないことです。
例えば。 これらは、ラップトップ コンピュータ内で LCD スクリーンのバックグラウンド イルミネーションを点火するために使用されます。