ICCDカメラ 技術資料(2) Stanford Computer Optics
Stanford Computer Optics
高速ICCDカメラ内部のCCDセンサー
スタンフォード・コンピュータ・オプティクス社の強化型CCDカメラには、さまざまな種類のビデオユニットが用意されている。ビデオユニットとは、CCDセンサーと出力信号を形成する専用電子機器の組み合わせを意味する。
ビデオユニットの最も顕著な違いは、アナログで動作するかデジタルで動作するかである。CCDセンサー自体はもちろんアナログなので、ビデオユニットから送られてくる出力信号の種類が違うだけである。アナログもデジタルも、それ自体にメリットがあるわけではありません。どちらかが有利になるかどうかは、用途によって異なります。デジタル時代には、たとえアナログがデジタルを凌駕していても、時代遅れとみなされることが多いことも覚えておいてください。
CCDセンサーの種類
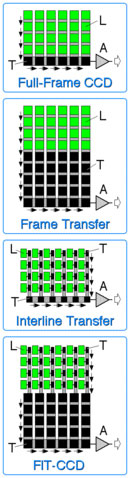
画像の乱れを防ぐためには、読み出しの際にCCDの画素に光が当たらないようにすることが重要だ。最も簡単な方法は、ICCDイメージインテンシファイアのシャッター機能を利用して、CCDの前にシャッターを設置することだ。もっとも、最もシンプルなCCDチップは、図のような「フルフレームCCD(Full-Frame CCD)」と呼ばれるものである。
フレーム転送方式のCCD(Frame Transfer)チップは、収集した電荷を光を通さない領域に高速で転送してから、実際の読み出し処理を開始する。この領域は、CCDの感光面の下に位置する。
ライン間転送CCD(Interline Transfer)チップでは、画素の電荷を隣接するカバー画素にシフトするだけなので、1回のシフトで済み、フレーム転送よりも高速に処理することができます。
フレーム転送型CCD(FIT-CCD)チップは、後者の2つの構造を組み合わせることで、ノイズの発生を抑え、読み出し性能を向上させている。
一定の面積を持つCCDセンサーは、解像度が高いほど画素が小さくなる。画素が小さくなればなるほど、S/N比は低くなる。これは、ノイズ源の中には、信号のように画素の表面積に応じて変化しないものがあるためだという。したがって、解像度が高いほど、S/N比は低くなります。
Read more about CCD sensors here.
デジタルCCDセンサー 出力制御
デジタルCCDセンサーは、カメラヘッドに搭載されたA/D変換を行い、デジタル出力信号をHigh Speed USB 2.0で送信します。
High Speed USB 2.0
デジタルビデオユニットのダイナミックレンジは、最大で14ビットをカバーしています。このダイナミックレンジを利用して、ビデオゲインを調整することができます。
当社のダイナミックレンジエクスパンションシステムは、使用するハードウェアに関係なく、最大32ビットまでの解像度向上を可能にします。原則として、ビット数の半分は、ショットノイズの項で説明した入射光のショットノイズを解決していることを念頭に置いてください。
なお、実際のフレーム数(fps)は、使用するPCに依存するため、異なる場合があります。
ICCDカメラに冷却は必要か?
ICCDカメラにおけるアクティブ・クーリングCCDセンサーの利点と必要性は、さまざまな画像技術の計算と一緒に描かれることが多い。ここでは、スタンフォード・コンピュータ・オプティクス社の増感型CCDカメラをはじめとする増感型撮像システム専用の能動冷却型CCDセンサーの必要性について考察してみたい。
CCDセンサーの暗電流によるノイズは、信号に比べてどのくらい発生するのですか?
他のイメージングシステムとの大きな違いは、増感型CCDカメラでは、信号がCCDセンサーに到達する前に、入射光を増幅することです。そのため、たとえ単一の光子であっても、CCDセンサーに到達した時点で、その信号は高度に増幅される。つまり、EM-CCDやCMOS、CCDカメラとは対照的に、入射信号はあらかじめ増幅されており、したがって、CCDセンサーの暗電流よりもはるかに高い値を示している。ICCDシステムでは、イメージインテンシファイアによって信号が早期に増幅されるため、下流に設置されたCCDセンサーは画像のS/R比への影響が少なくなります。そのため、CCDセンサーの暗電流は、増感型CCDカメラの画質にほとんど影響を与えません。
増感された信号がCCDセンサーに到達し、アクティブクーリングが不要になる
暗電流」という言葉は、この電流が入射光とは関係なく、完全な暗闇でも同じように発生することに由来する。CCDセンサーの出力では、暗電流で発生した電子は信号で発生した電子と同じように見える。さらに、暗電流はセンサーの温度に依存し、センサーの温度が上がると急激に減少する。しかし、ICCDカメラのイメージインテンシファイアでは、入射光があらかじめ増幅されているため、暗電流の低減にはさらなる努力が必要です。
増強イメージングシステムによる画質の限界要因
増強されたCCDカメラの画質にとってより重要なのは、イオンフィードバックと搭載されたイメージインテンシファイアのEBI(等価背景照明)[2]である。イオンフィードバックとは、自由に動くイオンによってイメージインテンシファイアのMCP内で発生する人工的な2次電子の雪崩のことである。EBIは、イメージ管の電源を入れても光電面に全く光が当たらない状態の光量です。温度の影響を受け、暖かいナイトビジョン機器ほど背景の照明が明るくなります。EBIはルーメン/平方センチメートル(lm/cm2)という単位で測定され、値が小さいほど良好です。したがって、EBIは増感型撮像装置の限界であり、EM-CCD、CMOS、CCDセンサーの暗電流に相当する。
増強されたCCDカメラにはアクティブクーリング方式のCCDセンサーは必要ない
D. Dussault氏のシミュレーション[3]や上記の議論から明らかになったのは、増感CCDカメラでは、CCDセンサーの冷却や読み出しに特別な努力をする必要はないということです。実際のところ、暗電流や読み出しノイズはICCDカメラのS/Nにはほとんど影響しない。
References:
1) David W. Gardner, Does Your CCD Camera Need Cooling?, Journal: Photonics Spectra (2002)
2) A.K. Musla and A.K. Jaiswal, Effect of Image Intensifier Tube Equivalent Background Illumination on Range Performance of Passive Night Sight, Defence Science Journal, Vol. 57, No. 6 (2007)
3) David Dussault ; Paul Hoess, Noise performance comparison of ICCD with CCD and EMCCD cameras, Proc. SPIE 5563, Infrared Systems and Photoelectronic Technology, 195 (2004)
インターフェイスオプション:ICCDカメラからPCへ
標準のUSB2.0デジタル出力を搭載した高速ICCDカメラ
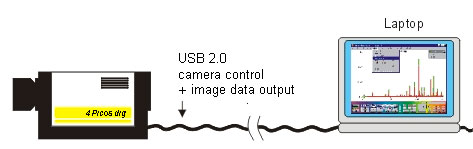
ICCD camera with USB 2.0 connection type
高速USBインターフェースを採用しているので、フレームグラバーは必要ありません。PCやラップトップにカメラを接続して再生することができます。高速USBは、実験室でも現場でも、最大限の柔軟性を発揮します。しかし、CameraLinkインターフェースと比較して、高速USBはフレーム転送レートにやや制限があります。高速USBは60MBpsで、左欄の図に示されている理論上の最大フレーム転送速度になります。
この制限を克服するために、当社では、PCへのフレーム転送速度とは別に、フレーム取得速度を向上させるための追加のオンボード・メモリーを提供しています。もちろん、ビニングを行うことで、さらにフレーム転送レートを上げることも可能です。
理論上の最大フレーム転送速度は
⦿ 高解像度CCDチップ=2.8MB/フレーム⇒21フレーム/秒
⦿ 標準解像度CCDチップ=0.9MB/フレーム⇒66フレーム/秒
注:ギガビットイーサネットが登場します。
ギガビットイーサネットインターフェースは、ほとんどのPCやラップトップにオプションまたは標準で搭載されています。10Gbps = 1.25GBpsは、フレームグラバーを必要としない究極のフレーム転送速度を提供し、最高のデータ転送速度と、ラップトップでの最大限の柔軟性と使いやすさを実現します。スタンフォード・コンピュータ・オプティクスのCCDカメラは、ギガビット・イーサネット規格にアップグレードすることができます。
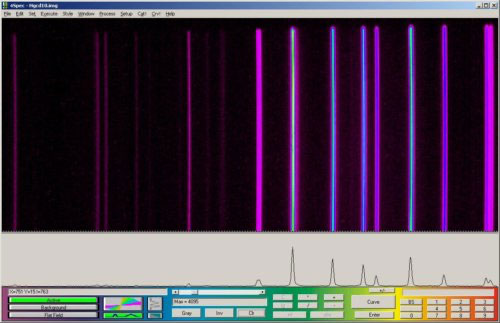
高速ICCDカメラ用ソフトウェア
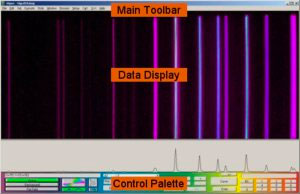
Main window of the 4 Spec E software.
4 Spec Eソフトウェアは、ICCDカメラの制御とデータ処理を簡素化
4 Spec Eソフトウェアは、ICCDカメラの制御とデータ処理を簡素化します。
スタンフォード・コンピュータ・オプティクス社のICCDカメラは、RS232、カメラリンク、またはUSB接続で遠隔操作が可能なスタンドアローンソリューションです。4 Spec Eソフトウェアは、超高速ICCDカメラシステムの運用に必要なすべての要件を満たすオールインワンソリューションとして機能します。
4 Spec Eの基本的な外観は、ウィンドウの下部にメインツールバー、データ表示、コントロールパレットがあります。4 Spec Eソフトウェアのすべての機能は、メインツールバーから利用できます。カメラの制御とライブモニターには別のウィンドウが表示され、カメラの制御と録画データの後処理を同時に行うことができます。詳細については、カメラコントロールインターフェースの詳細情報をご覧ください。
4 Spec Eのデータ後処理は、画像編集と分光分析に分かれています。これらの異なる要求に対して、4 Spec Eソフトウェアは、画像、カーブ、カタログの3つのデータ表示を提供します。データ表示は、メインツールバーの「Img!」、「Crv!」、「Cat!」のボタンでそれぞれ選択できます。特定のデータ表現を選択すると、4 Spec Eウィンドウの外観が変わります。メインツールバーと下部ディスプレイのコントロールパレットからは、頻繁に使用する機能に直接アクセスできます。
4 Spec Eソフトウェアのメインウィンドウ
任意の画像データを選択すると、コントロールパレットからイメージエディターの主要機能に直接アクセスできます。背景補正やフラットフィールド補正などの機能は、コントロールパレットから直感的に操作することができます。4 Spec Eの画像編集機能や可能性については、イメージエディターの詳細説明をご覧ください。
カーブやカタログデータの解析 4 Spec Eには、分光データを解析するためのさまざまな機能が用意されています。これらの機能は、生データからのスペクトルの抽出、カーブの取り扱い、キャリブレーション、カーブの表示、データのエクスポートと保存をカバーしています。スペクトル解析ソフトウェアとしての4 Spec Eの機能と可能性については、「スペクトルパッケージ」の項で説明します。
厳選された機能
感度 1カウント/光電子/ピクセル以上
水平・垂直ビニング構成
CCD検出器で最大80秒の積分時間
画像1ラインスキャンから582ラインまで
2次元および3次元オーバーレイ
ピークファインダー、ピークインテグラル
波長、波数、光子エネルギーの校正
イメージング機能(例:レーザープロファイリング用
システム要件
インテルプロセッサ、ペンティアムまたはAMD
128 MB RAM
使用可能なオペレーティングシステム
Windows 7(32ビット/64ビット
Microsoft Vista(32ビット/64ビット
Microsoft XP (32bit/64bit)
Windows 98/2000
PCI-Bus with PCI-Chip Version 2.1以上
4 Spec Eソフトウェア:リモートカメラ制御
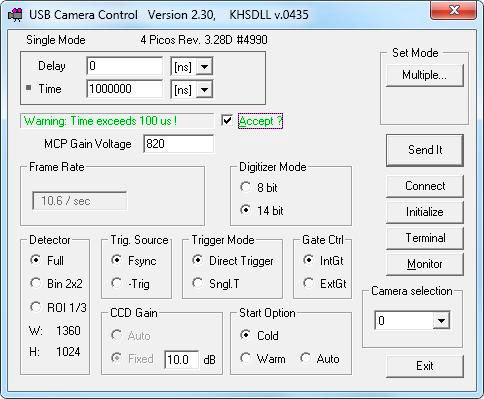
Screenshot of the remote camera control window.
カメラコントロールウィンドウは、直感的なICCDカメラのインターフェースを提供します。
4 Spec Eソフトウェアのカメラコントロールコンソールは、Stanford Computer Optics社のすべての超高速ICCDカメラをリモートコントロールするための、非常に快適で直感的なインターフェースを提供します。
すべての操作モードと作業パラメーターに直接アクセスできます。増幅器の主な制御パラメータは、ゲイン電圧、内部または外部ゲート制御、ゲート遅延時間、ゲート開放時間です。トリガーオプション、ガンマ補正、ビデオゲイン、カメラスタート動作、積分時間などが調整可能です。トリガーオプションと操作オプションは、カメラコントロールウィンドウからリモートで設定することができます。これらのパラメータは、トリガーモード、多重露光パラメータ(露光回数、各露光のゲートタイム、各露光の間隔)などです。
4 Spec Eソフトウェアでは、データ取得中に基本的なデータ操作も可能です。これらのパラメータには簡単にアクセスでき、ビニング、複数のラインまたはロウのグループ化、関心領域の選択、画像の自動回転などが含まれます。
また、これらの基本機能に加えて、オプションで自動露出制御や露出オーバーのシャットダウン機能を搭載することができます。この機能は、イメージインテンシファイアや増感CCDカメラの保護のため、光の状態が変化する環境下での運用に特に推奨されます。
高速ICCDカメラシステムの動作中に調整可能なパラメータの一覧です。
イメージインテンシファイアゲイン
ゲート時間とゲート遅延時間
アナログビデオカメラ:ガンマ= 0.45または1.0
ビデオカメラのゲイン、自動または調整可能
アナログカメラをフレームまたはフィールド操作に設定します
単一または複数の露出を設定し、複数の露出の場合は、複数の露出パラメータ(最大繰り返しレート10 MHz)、つまり、露出の数、それぞれのゲート時間、それぞれの間隔、および複数のシリーズの最初の露出までの遅延を設定します
「ウォーム」または「コールド」スタートを設定します。「ウォーム」スタートとは、最後にシャットオフしたときと同じパラメータでカメラが起動することを意味します。「コールド」スタートのデフォルトは標準パラメータセットです
奇数またはすべてのフィールドにビデオ同期出力を設定する
任意の期間、つまり時間ビニングにわたる標準ビデオまたはCCD統合用に設定
シングルトリガーディスクリミネーターを設定します; これにより、ユーザーは、カメラをトリガーする一連のトリガーの数を決定できます。
内部フレームグラバーがインストールされている場合は、ダイレクトビデオまたはオンボードストレージに設定します
オプション:さまざまな光条件下で動作するように自動露出制御を設定します
オプション:光強度が突然増加するインテンシファイアを保護するには、露出オーバーシャットダウンを設定します。
4 Spec Eソフトウェア:画像エディター
4 Spec E appearance in the image editor view.
4 Spec Eソフトウェアは、画像の取得、処理、編集、保存を行います。
画像編集モードでは、アクティブな画像、背景画像、フラットフィールド画像の3つの画像に同時に直接アクセスできます。アクティブな画像は、現在処理されている画像で、背景画像はシーンの背景照明を提供し、フラットフィールド画像は画像上の系統的な明るさの不均一性を補正するために使用されます。
画像取得
4 Spec Eでは、直感的な操作で画像を取得できるほか、シーケンススキャンやリアルタイムシリーズなど、他のフォーマットでの取得も可能です。リアルタイムシリーズでは、ビデオレートでフレームをスキャンすることができますが、繰り返しのレートはカメラのハードウェア設定によって異なります。撮影後、リアルタイムシリーズは全体として保存することも、選択した画像をアクティブな画像として転送し、補正を行って個別に保存することもできます。さらに、1回の撮影で撮影した画像をまとめて、信号の強調やS/Nの改善を行うこともできます。個々の画像は、アクティブ画像としてもバックグラウンド画像としても保存できます。また、背景画像やフラットフィールド画像は、割り当てたり、ファイルから読み込んだりすることができます。
画像の補正と処理
バックグラウンドおよびフラットフィールドの補正は、データ取得時に自動的に行うことができます。これにより、画像の背景信号を抑制したり、使用しているイメージインテンシファイアの強度不均一性を補正したりすることができます。
さらに、基本的な数学的演算(+、-、/、*)を、画像と定数をオペランドにして、あるいは2つの画像を使って、ピクセルごとに演算することができます。さらに、画像を異なるカラーバーで表示したり、ユーザーが選択した位置の垂直および水平プロファイルで表示することもできます。
画像の保存とエクスポート
画像はimg-file形式で保存するのが最も簡単です。このファイルフォーマットは32ビットの解像度を持ち、適用されたビニングや画像の関心領域の選択などの追加情報も保存できます。高い繰り返し率を必要とする実験の場合は、img-fileフォーマットでの自動保存を有効にすることができます。各画像は、さらにtiffまたはbmpファイル形式でエクスポートできます。さらに、RAWデータフォーマットでは、生データに簡単にアクセスできるように、16ビットの整数フォーマットで、ヘッダー情報なしに画像を1行ずつ保存することができます。
4 Spec Eソフトウェア:分光分析
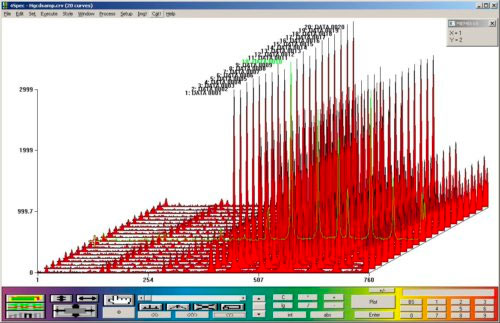
3D overlay plot of multiple spectra in curve data presentation.
4 Spec Eは、包括的で使いやすい分光分析ツールです。
4 Spec Eは、超高速ICCDカメラシステムの分光アプリケーションに拡張機能を提供します。ICCDカメラと分光器の組み合わせは、研究者や開発者が非常にダイナミックなプロセスを発見するためのユニークなツールとなります。4 Spec Eソフトウェアは、2D生画像からのスペクトル抽出、スペクトルの処理とキャリブレーション、データの表示と保存を可能にします。
2D画像からのスペクトル抽出
4 Spec Eソフトウェアは、2D画像から定義された領域内の1つまたは複数のスペクトルを簡単に抽出することができます。領域を定義した後は、ワンクリックで一連のスペクトルを抽出することができます。さらに、データ取得中にスペクトルの抽出を自動的に行うこともできます。抽出された個々のスペクトルは、4 Spec Eのカタログデータで分析・プロットすることができます。カーブビューでは、個々のカーブまたは一連のカーブを表示し、修正することができます。
スペクトルの取り扱いとキャリブレーション
個々のスペクトルを選択して、カーブデータ表示で処理することができます。これにより、4 Spec Eの主な分光機能に素早くアクセスすることができます。 カーブはバックグラウンドで補正および校正することができます。最大6つの校正ポイントと、さまざまなフィッティング機能を利用できます。検量線データは保存しておくことができ、特定の実験セットアップのための検量線が確立されるとすぐに読み込むことができます。
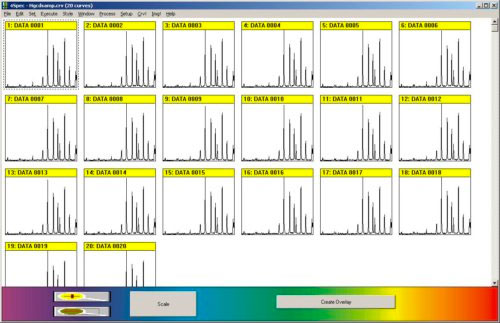
Multiple spectra shown in the spectra catalog.
ラマン散乱実験のためのキャリブレーション機能を提供するために、特別な配慮がなされています。ラマンシフトのキャリブレーションは以下のソフトウェアで簡単に行うことができます。
4 Spec Eソフトウェアで簡単に行うことができます。さらに、カーブは、カーブ間の数学的演算や定数の演算のオペランドとして使用できます。カーブの処理とキャリブレーションの後、内蔵のピークファインダーでピークを見つけ、いくつかのピークのピーク積分を求め、時間に対してプロットすることができます。
データの表示と保存
4 Spec Eソフトウェアでは、さまざまな方法でデータを表示することができます。複数のスペクトルの違いを示すには、2Dまたは3Dのオーバーレイプロットが適しています。また、スペクトルの時間変化を表現するには、内蔵のムービーメーカーを使って直感的にデータを表示することができます。複数のスペクトルを2Dのカラープロットに変換するコンタープロットは、スペクトルの視覚化に非常に有効です。個々のスペクトルは、crvファイル形式で保存できます。さらに、他のソフトウェアツールで曲線を読むために、スペクトルをtxtファイル形式でエクスポートすることもできます。
これらの機能により、「4 Spec E Software」は包括的で使いやすい分光分析ツールとなっています。スタンフォード・コンピュータ・オプティクス社の高速ICCDカメラシステムは、様々な分光アプリケーションに利用されています。
超高速ICCDカメラの光学性能
増強されたCCD超高速カメラは、主に残光下での撮影や極端に短い露光時間での撮影に使用されます。ICCDカメラにはイメージインテンシファイアが搭載されていますが、撮影結果の画質は絶対的な光量に依存する場合があります。
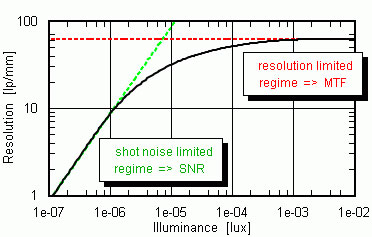
光がなければ、映像はまったく見えない。ごく少量の光があれば、それは光が個々の粒子で構成されているように見える。連続した光ではなく、単一の光子による「あられ」のような爆撃が行われることになる。そのため、非常に低い照度では、人間の目が画像を形成するのに十分な光子がありません。照度を上げれば光子の数は増え、ノイズのない画像が得られる。しかし、図のように照度がさらに上昇するまでは、非常に小さなディテールを識別することはできません。つまり、画質、すなわち画像の解像度は、一般的に低光量条件での利用可能な光量に依存します。このような作業条件は、低光量領域またはショットノイズ制限領域と呼ばれ、画質は信号対雑音比SNRで表されます。
十分な光量があれば、ノイズ感は消えます。画質は格段に向上し、照明の強さに依存しなくなります。図からわかるように、光量が多い状態では、ラインペア/mmの光学解像度は一定です。したがって、画質は、この限界光学解像度によって、変調伝達関数MTFまたはコントラスト伝達関数CTFを用いて記述することができる。
ご注意:超低照度下での粗い画質は、ICCDカメラシステムの欠陥ではなく、光の量子的な特性の現れです。この問題を解決するには、露光時間を長くするか、あるいはSTANFORD COMPUTER OPTICS Dynamic Range Expansion Systemのような高度なフレーム追加技術を用いるなどして、利用可能な光量を増やすしかありません。
明るい光の条件:限界解像度
明るい光レベルの条件では、画像には「光子の粒度」がほとんどありません。ラインペア/ mmでの光学分解能は一定であり、照明強度に依存しません。これらの作業条件は解像度制限レジームと呼ばれ、制限解像度は変調伝達関数(MTF)と コントラスト伝達関数CTFによって記述されます。
光学システムのコントラストCは、入力信号の空間変調周波数の関数です。入力は100%変調されている必要があり、平行な黒と白の線のペアの画像である可能性があります。出力は、暗い灰色と明るい灰色の線のペアの画像になります。次に、出力のコントラストは、
C =(最大輝度-最小輝度)/(最大輝度+最小輝度)
で定義され、出力画像から取得された輝度が使用されます。このコントラストは空間周波数に依存します。1ミリメートルあたりのラインペアが多いほど、つまり画像の詳細が小さいほど、出力のコントラストは低くなります。
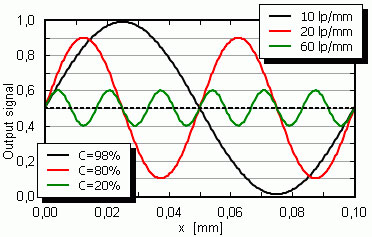
例えば、以下のようになります。
入力信号のコントラストを
全ての空間周波数において、Cin = (100 - 0) / (100 + 0) = 1,0となります。
そして、対応する出力信号のコントラストは次のようになります。10 lp/mm。10lp/mm:Cout = (99 - 1) / (99 + 1) = 98パーセント
20 lp/mmの場合 20lp/mm:Cout=(90-10)/(90+10)=80
60lp/mmの場合 Cout=(60-40)/(60+40)=20
となり、図のようになります。
変調伝達関数とコントラスト伝達関数の違いは、MTFの測定には正弦波の入力信号を用いるのに対し、CTFの測定には矩形波の関数を用いることだけです。
人間の目は3%までのコントラストを認識することができるので、これを限界解像度RLと定義する。以下では、ICCDコンポーネント単体の限界解像度と、その結果としてのICCDカメラ全体の限界解像度を示します。
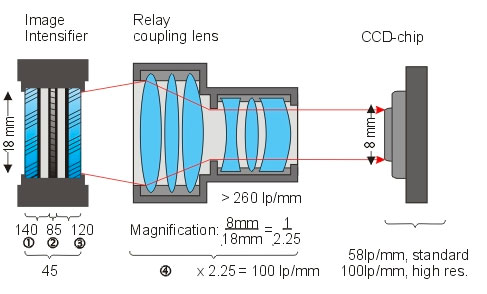
1. 光電面
光電面の限界解像度は、主に光電面とマイクロチャンネルプレート間の加速電圧に依存します。その値は約140lp/mmです。
2. マイクロチャンネルプレート
2つのマイクロチャネル間の平均距離が6ミクロンの場合、1段のマイクロチャネルプレートの限界解像度は85lp/mmとなります。
3. 燐光体スクリーン
蛍光体スクリーンの限界解像度は、マイクロチャンネルプレートと蛍光体スクリーンの間の電圧と、蛍光体層の厚さで決まる。一般的には120lp/mmとなる。
4. カップリングレンズ
スタンフォード・コンピュータ・オプティクス社のカップリングレンズは、260lp/mm以上の限界解像度を実現しています。
イメージインテンシファイアのメーカーは、18mm口径のインテンシファイアの限界解像度を62lp/mmあるいはそれ以上としています。しかし、ICCDカメラに20年間携わってきた当社の経験から、より現実的で信頼性の高い値は44程度であると考えています。もちろん、これは良いことではありませんが、それが今日の現実です。しかし、当社のカップリングレンズの再現率2.25と合わせると、CCDチップ表面の画像の限界解像度は100lp/mmとなります。
ちなみに、標準解像度の1/2インチCCDチップ(780×580画素)の最大解像度は58lp/mm、高解像度の1/2インチCCDチップ(1360×1020画素)の最大解像度は106lp/mmである。
技術情報
ICCDシステムの概要
イメージインテンシファイア
高速シャッタ
カップリングレンズ
ビデオユニット
カメラPCインターフェース
ソフトウェア
光学解像度
限界解像度
信号対雑音比
ダイナミックレンジ
露光モディ
トリガーオプション
ICCDとEMCCDの比較
低照度:信号対雑音比
低照度条件:S/N比
信号対雑音比SNRとは、入力された信号の平均値とその標準偏差の比で定義されます。下図は、イメージインテンシファイア方式のCCDカメラと電子増倍方式のCCDカメラの超低照度環境下でのS/N比を示したものです。
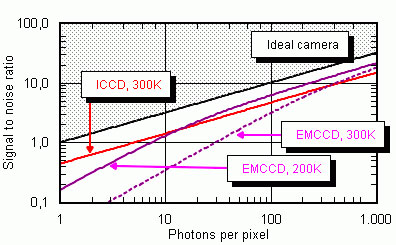
EMCCDカメラの場合、フレーム加算とロングフレームの違いは、EMCCDセンサーの読み出しノイズがフレーム加算ごとに増幅・蓄積されていくことに起因しています。そのため、EMCCDカメラではロングフレーム動作が好ましいとされています。
また、ICCDカメラでは冷却の必要がありませんが、EMCCDカメラでは強力な冷却が必要となります。これは、EMCCDセンサーも自らの暗電流ノイズを目的の信号と同程度に増幅しているためです。しかし、ICCDカメラでは、まずイメージインテンシファイアで欲しい信号を大きく増幅してから、比較的余裕のある暗電流ノイズを加えています。そのため、CCDセンサー自体を冷却してもしなくても、その温度が約30℃を超えなければ、目に見える違いはありません。
理想的なカメラのS/N比とは、カメラのノイズの影響を一切考慮せずに、光信号の平均値とショットノイズの比だけである。信号のショットノイズは、信号の平均値から平方根をとったものである。したがって、すべての光信号の信号対雑音比は、単純にその平均値の平方根に等しくなります。
この理想的なS/N比は両図とも黒線で示されており、ハッチングされた部分にはアクセスできないようになっています。
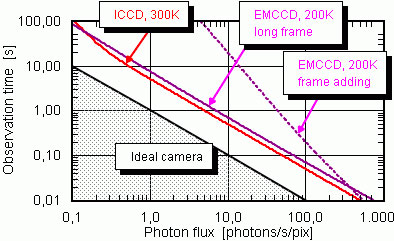
2つ目の図は、S/N比を1にするために必要な総観測時間です。この総観測時間は、長い露光時間、長いフレーム、またはそれに対応した短い露光時間の積み重ね、フレーム加算のいずれかによって得られます。
ICCDカメラの場合、読み出しノイズが増幅されないため、どちらの動作モードでも大きな違いはありません。このことから、ICCDカメラタイプは、ダイナミックレンジ拡大システムによる大幅な解像度向上の前提となるフレーム加算動作に適しているといえます。
図の引用元である著作物はこちらをご覧ください。